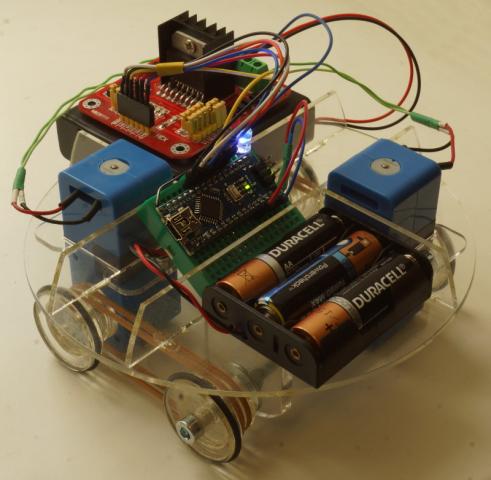
Шасси с моторами и редукторами для робота, автомобиля
Adior - вс, 12/06/2016 - 10:11
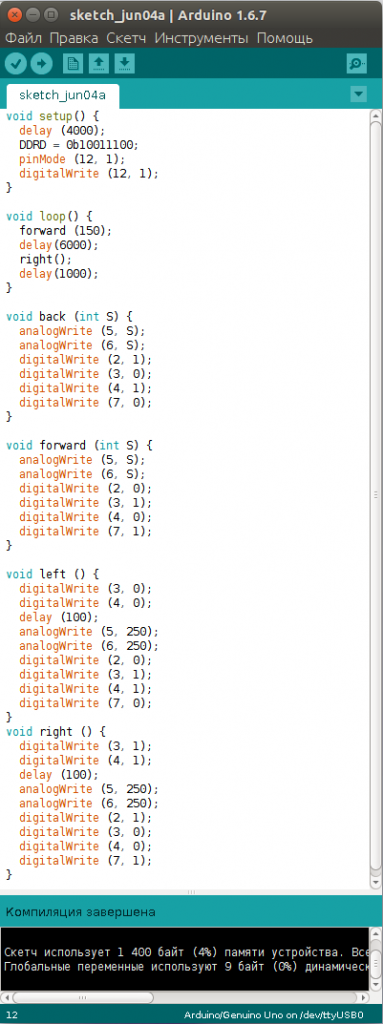
Для управления моторами с помощью Ардуино написаны подпрограммы forward(), back(), left(), right(). Функции left() и right() не имеют параметров и выполняют разворот на максимальной скорости. Уменьшение скорости разворотов может привести к заклиниванию одного из моторов, так как во время разворотов колеса испытывают существенную силу трения. Функции forward() и back() имеют один параметр (целое число от 0 до 255) определяющий скорость движения. Причем, в нашей тележке устанавливать скорость ниже 50 нельзя, так как на влу двигателей, в этом случае, не хватает крутящего момента, что бы сдвинуть тележку с места.
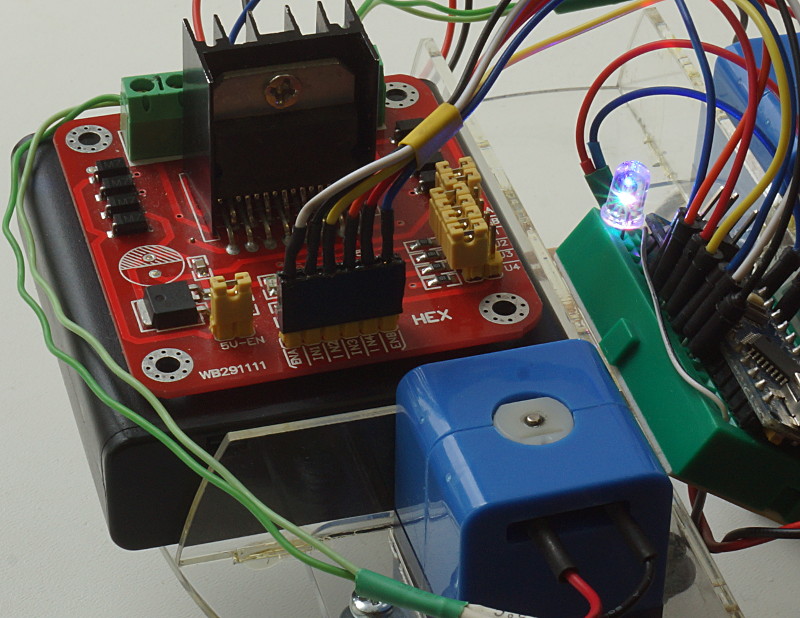
Соединение драйвера моторов L298N с Arduino NANO
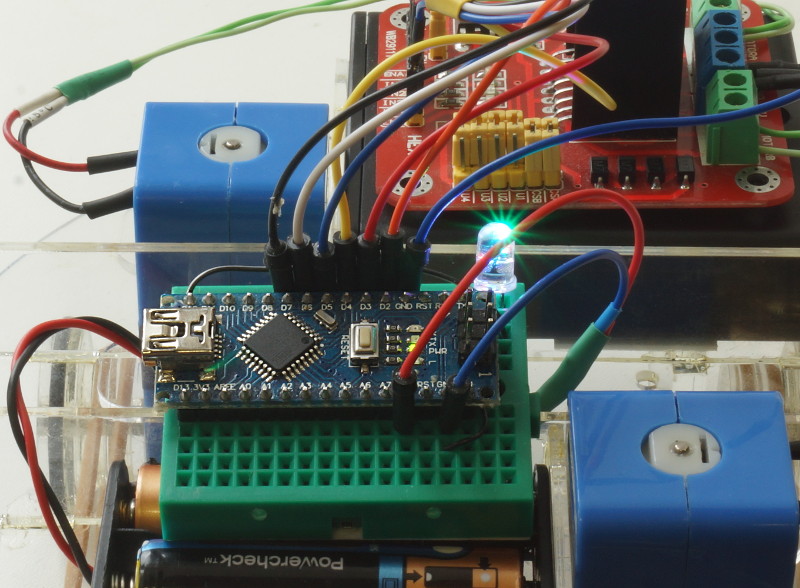
Подключение Ардуино Нано.
Руководитель:
Участники: